下载贤集网APP入驻自媒体
来源:传感器专家网
随着霍尔技术的发展,已经出现了能够检测在三维空间内运动磁体或磁场的霍尔传感器,可称为三维霍尔传感器。它能够检测三维空间内某一个位置点的磁场的三个分量值和大小。如果将三维霍尔传感器固定在空间某一点,在它临近的三维空间内,有一个已知的小磁铁运动并引起周围的磁场变化,三维霍尔传感器可以通过检测它这一点的磁场,获取X、Y、Z三维方向的磁场分量值,则可以计算出小磁铁的位置;如果在整个检测过程中叠加上时间分量,则可以获得小磁体的运动轨迹。
汽车用换档手柄在驾驶员操作时,它的运动方式并不复杂。在一个以转动点为圆心的半圆球面上进行运动,通过限位及导向机构限制手柄的运动,构成一个个的档位位置。经过换挡模式和逻辑的判断,在确定手柄的档位后发送给变速箱系统进行车辆的换挡操作
霍尔技术和霍尔元件已经大量应用在车辆电控技术中,如油门踏板,方向盘转角传感器等平面运动的应用上,它在汽车领域的应用已经不成问题。并且三维霍尔元件的功能,与换挡手柄的运动相符,可以运用到汽车换挡手柄的设计方案中。可以使得换挡机构更加简单,只需要一个三维霍尔传感器,无需其它传感器和接触开关,即可完成位置检测;同时也可以使得换挡机构更加的灵活,适用于不同的换挡模式,只需要通过对手柄的限位机构的更改,以及软件内部的配置更改,就可以完成换挡模式的切换。相对于传统的换挡模块,具有结构简单,体积小重量轻,更改方便等优势。
1. 三维霍尔传感器技术
三维霍尔传感器技术是指基于霍尔效应,通过霍尔传感单元的组合,能够检测空间X,Y,Z三维方向的磁场强度的一种非接触式传感技术。它的主要应用原理是基于通过多个一维传感器或者二维传感器组合,达到三维磁场的检测能力。同时它对于磁场强度的检测也具有较高的精度和分辨能力。Melexis公司所生产的MLK90363系列三维霍尔传感器元件,它是目前应用普遍的一款三维霍尔传感器。
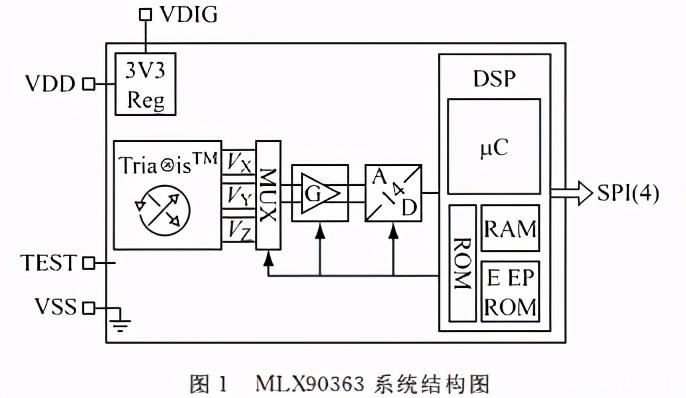
基于它的Triais技术,使用一片圆形的磁场聚集片,在MLK90316系列的基础上,增加2个霍尔感应单元,共4个感应单元。圆形磁场聚集片将空间中的磁场聚集到同一个平面上,通过霍尔感应单元分别检测三个方向对应的磁场强度,通过内部DSP计算出磁场与各个平面的夹角,获得磁体在空间上的位置数据。如图1MLK90363系统结构图所示,霍尔传感单元检测三个方向的电压值Vx,Vy,Vz,经过差分器、放大器和模数转换器,传输给内部DSP模块进行位置的计算和修正,最后由串口SPI通信总线向外发送对应的位置数据值{X,Y,Z}。
2. 换挡模块工作原理
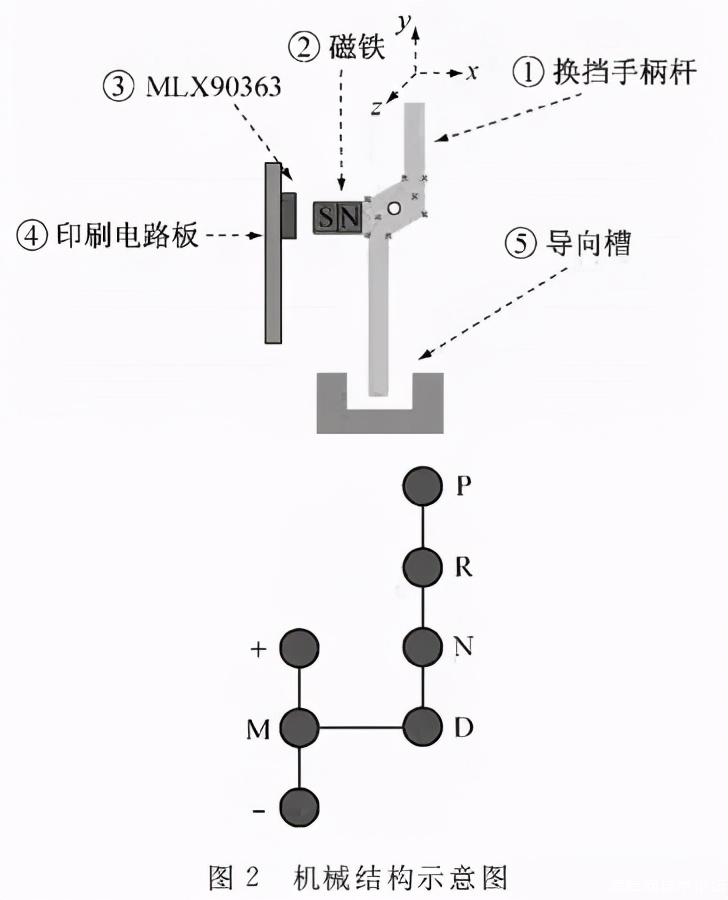
结合MLK90363霍尔传感器的功能,可以构建一个小范围内移动物体的三维位置检测系统。如图2左侧所示的换档手柄机械结构示意图,霍尔传感器右侧,有一个S极朝向霍尔传感器的小磁体。而小磁体在三维空间的位置和运动,将引起MLK90363芯片附近的磁场变化。固定MLK90363的位置,就可以检测MLK90363位置的磁场强度,以此就可以进行小磁体的位置计算。
如图2所示的换挡手柄机构示意图,在它的底部有一个导向和限位结构,换挡手柄杆绕着中心轴旋转,并由导向槽限制它的运动位置。在手柄的中间位置靠近转动轴的位置,集成一个小型磁铁,其中磁场S极朝向印刷电路板上的霍尔传感器。
通常车辆的换挡模式如图2右侧,包含P、R、N、D、M、M+、M-两列共7个位置。当驾驶员操作换档手柄杆运动时,带动小磁体前后及上下小范围运动,引起霍尔传感器附近的磁场变化。
集成在印刷电路板上的霍尔传感器可以不停的检测三维方向磁场强度值,与集成在印刷电路板上的主控制芯片进行通信。经过主控制芯片的计算与判断,可以获得当前的手柄位置,即图2所示的换挡机构的各个档位。换挡机构与变速箱进行通讯,告知当前的驾驶员换挡手柄位置,从而使得整车完成换挡行为。
3. 换挡模块电气结构
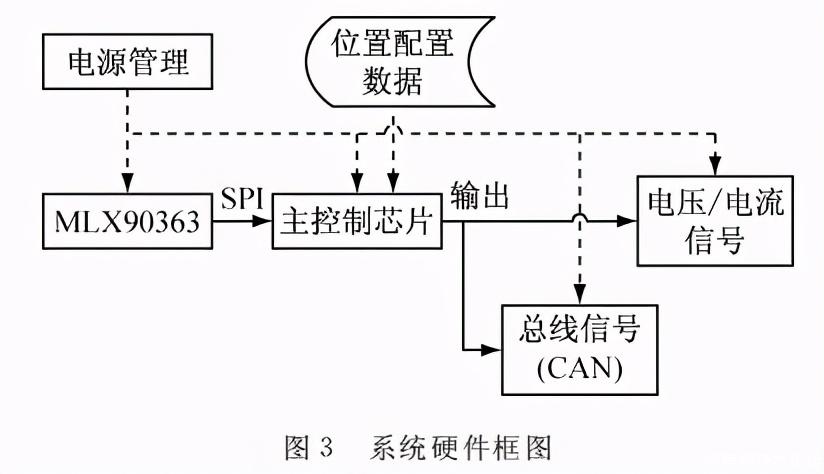
除了三维霍尔传感器之外,换挡模块的电气部分还包括其它三个部分,如图3所示,分别为电源管理部分,主控制芯片部分和信号输出部分(总线信号/电压/电流信号)。通过共四个部分之间的电气信号的传输与逻辑计算,完成换挡模块从手柄位置检测、判断和传输的功能。
换挡模块主要在车辆点火后开始工作,所以连接到点火电源即可。电源管理部分将点火电源的12伏电压转换为5伏电压,供主控制芯片、霍尔传感器以及CAN收发器使用。
因为换挡模块的功能比较单一,并且使用三维霍尔传感器电气结构更加简单。所以主控制芯片可以选用目前常见的单片机。本例中选择瑞萨公司的RH850系列芯片。它是一款低成本、低功耗,并具有多种外部接口的32位微处理器。它提供了多种芯片参数配置,最小48PIN封装的芯片资源同样满足了本方案的应用。
与变速箱信号传输,分别使用CAN总线以及备份的I/O线进行通讯。在单片机获取MLX90363检测所得的位置信号后,根据各个位置对应的档位,确定当前的手柄档位位置,通过CAN总线和I/O线向变速箱传输,完成整车换挡动作。
4. 档位识别逻辑
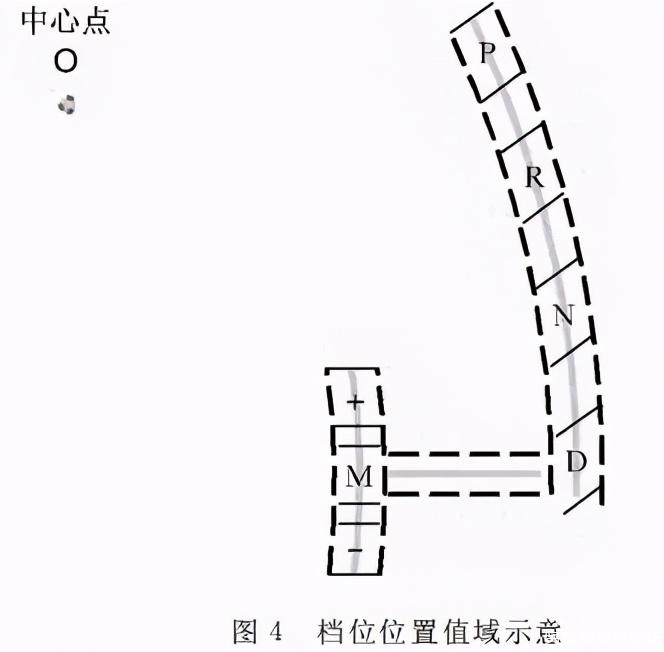
在档位位置识别和处理过程中,由霍尔传感器检测手柄不同位置(小磁体不同位置)的三个方向的磁场分量值,并经传感器内部计算后传输给主控制芯片。主控制芯片实时与霍尔传感器进行数据传输,将获得的每个位置磁场值进行记录和判断,确定手柄的当前位置。如图4所示,按照图2手柄运动轨迹可得到每个位置的数值对应的轨迹图。因为小磁体以霍尔传感器为圆心的球面上进行运动,检测所得位置曲线区间也是以中心点O为圆心的球面上,分别呈现出"P→R→N→D"和"+→M→一"两条轨迹区域。
因为手柄运动和导向槽的误差,每个位置都会有一定的误差存在,所以需要设定一定的误差范围,如图4中的红色线条所示。根据不同的机械结构和尺寸设计以及零件匹配的不同,可以根据多个样品进行位置轨迹的确认,结合使用手感及尺寸控制等,选定各个位置的有效区间,如图4中P、R、N、D、M、+、-各档位的位置区间。
通过以上方式确定每个有效档位位置的三个方向磁场数值(经霍尔传感器计算后的值){X±△x,Y士△y,Z士△z},设定在主控制芯片的配置数据区域。考虑到手柄操作速度的要求,软件设定以每2ms一次的频率与霍尔传感器进行通讯,获得每一个时刻的手柄位置值{X',Y',Z'}。
与预设的各个位置值的区间进行比较判断,判断检测到的数据是否落在有效位置区间内;同时还需结合前次的手柄位置,判断手柄的运动轨迹是否如设定的轨迹运行,以防止霍尔传感器检测数据发生错误导致的手柄位置跳变。
经过计算和判断,所确定的手柄位置和档位值,最终通过 CAN 网络向变速箱模块进行传输,由变速箱完成车辆换挡操作。
而对于不同的换挡模式,只需要改变手柄的限位导向机构,再通过对稳定的样品,在手柄运动轨迹内检测出对应的数据区域。只需要更改软件内部的数据区域配置,无需更改整个机械结构和电气结构,就可以完成换挡模式的切换,应用到不同的车型。