下载贤集网APP入驻自媒体
来源:算法集市
无人驾驶车辆的避障系统主要包括三个过程:
障碍物的检测和跟踪,获取障碍物的运动信息;
障碍物的运动轨迹预测,以及与无人车的碰撞预测;
避障路径的生成,即决策规划给出合理行驶路径以避让障碍物。
1、障碍物的检测
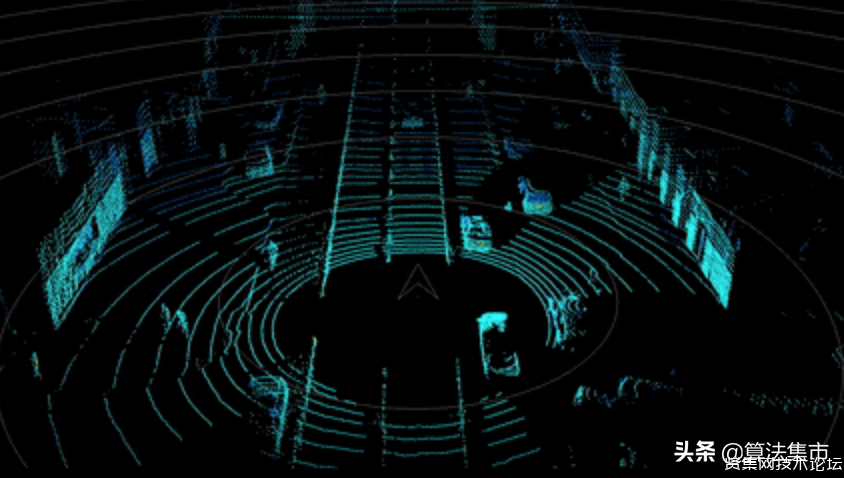
根据障碍物的运动状态可分为静态障碍物和动态障碍物。其中,静态障碍物可以从高精度地图里读取,也可以通过传感器(激光雷达、摄像头等)实时感知。
动态障碍物与静态障碍物有所不同,只靠传感器在单个周期获得的数据无法知道其运动信息,必须对一个序列的数据进行分析。一般用激光雷达来进行运动障碍物的检测方法有:地图差分法、聚类法。
地图差分法:根据在高精度地图上的障碍物在不同时刻与本车的相对位置关系,来求解障碍物的运动信息。即在全局坐标系中,静态障碍物的位置不会随时间变化,而动态障碍物则会随时间变化,发生变化的部分即认为是运动障碍物。
聚类法:将同一个障碍物的点云数据聚成一类,一般采用长方体或多边形体来描述车辆、自行车、行人等。
得到单帧的障碍物位置、大小的信息还不够,还需要对障碍物的运动轨迹进行跟踪,即目标跟踪问题。其中,多目标环境下的数据关联是多目标跟踪的关键问题。
2、障碍物的轨迹预测
对于障碍物的运动轨迹进行预测的方法可以分为三种:静态处理、假设状态保持不变、概率轨迹模型法。
静态处理是最简单的方法,它将所有障碍物都当做静态障碍物来处理,不考虑其运动特性,所以整个避障的效果也比较差。
假设状态保持不变的方法,即认为障碍物会一直保持当前的运动状态,是一种比较常用的轨迹预测方法,但由于实际障碍物的运动状态是会发生变化的,所以适用于一些直道匀速的场景,对于转弯、换道、停车,或在环岛、路口等场景的效果不理想。
概率轨迹模型法,是对假设状态保持不变方法的一种改进,在轨迹预测中加入了不确定性,对障碍物未来可能的行驶轨迹做了预测,为保持稳定,会偏向于保持原有状态的预测结果。使用高精度地图或结构化道路的先验信息可使这种方法获得更好的预测结果。
3、避让路径的生成在过去的几十年里,研究者提出了很多关于无人车的避障路径生成方法,典型的有人工势场法、反应式避障法和区域划分法,这些方法在特定环境中都取得了不错的效果,但也存在着不足。
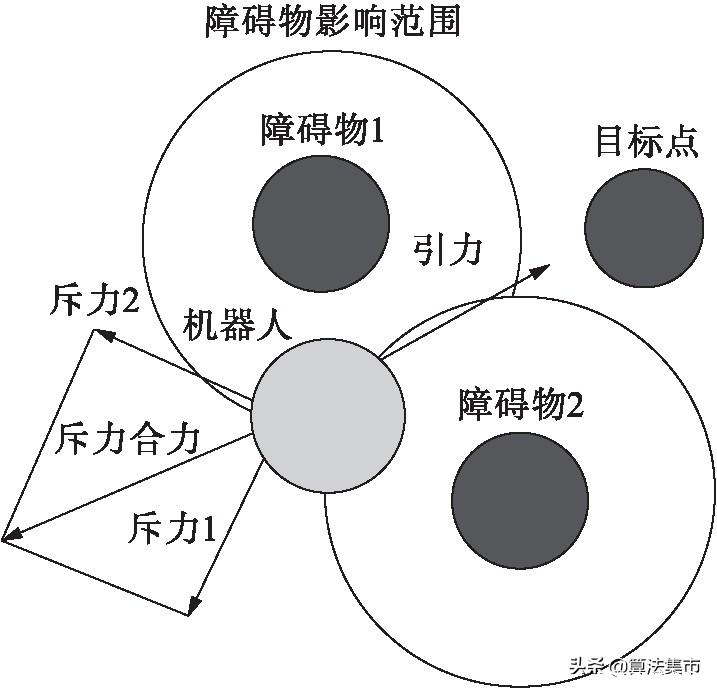
人工势场法是一种对电场模拟的方法。即构造一个势场函数,函数值 与 无人车和障碍物之间的距离存在对应关系,距离障碍物越远,势场越小。根据实际场景确定阈值,将势场小于阈值的区域标记为可行驶区域,从而完成避障。这种方法能够使无人车在复杂的静态环境中安全行驶,但在动态环境中,运动障碍物的运行轨迹会对势场造成动态的影响,从而使避让轨迹难以稳定,另外计算复杂度非常高,难以满足实时性的要求。
反应式避障法是一种模拟动物感知-行动过程的方法。即当无人车感知到前方路径上有障碍物是就重新规划一条路径避让障碍物。反应式避障法同样在静态环境中表现不错,但在动态环境中存在规划路径不稳定的问题。
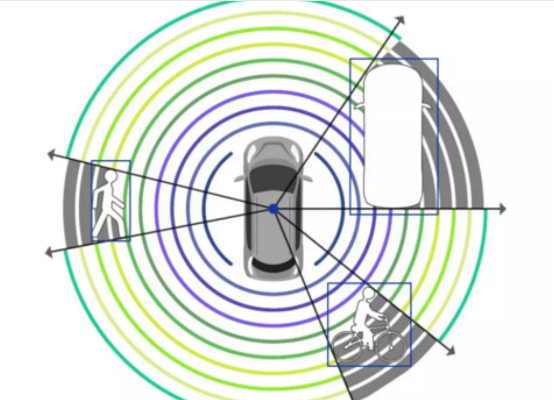
区域划分法是一种新的方法,即将无人车附件环境划分为安全区域和可能碰撞区域,区域的大小和无人车本身的运动状态相关,速度越快,可能碰撞区域就越大。这种方法理论是对静态环境和动态环境都适用,但也存在无法很好地定义运动障碍物所对应的可能碰撞区域的问题。